Steering Tiller
Introduction
The steering tiller is used to steer the aircraft while
taxiing and to park. The steering tiller is located
on the sidewall of the captain side.
With the tiller it is much easier to control the
aircraft during taxi and it is one step more in the
direction of realism.
Because I do not have a shell with a side
frame I build a column to place the tiller in an appropriate position. As additional value I can
place the cockpit notebook on the column platform. The notebook is
used for ground control (Remote AES) and to
display the IVAO network situation.
Realization
I bought the B737 tiller handle from Simparts in Germany. The
mechanics and the USB interface are from a racing car
steering wheel (Thrustmaster Challenge 5-in-1). Works very well and was not so
expensive at all. If you buy another type make sure
that the
 steering wheel is self-centering. The
electronic interface of the steering wheel acts like
a joystick interface. The tiller axis calibration was
done with FSUIPC (Joystick Calibration, Steering Tiller Axis). FSUIPC
uses the tiller axis to drive the FS rudder when on
the ground and speeds of less than 60 knots
(an adjustable figure in fsuipc.ini --> MaxSteerSpeed), and the rudder in the air
and on the ground above 60 KIAS. Below the
changeover speed control is divided proportionally
between tiller and rudder, so that, for example, at
30 knots it is half-and-half. But be careful, if the tiller
is set too sensitive you might over steer and leave
the rwy in a hurry. To avoid this use the
possibility of FSUIPC to make the slope less steep
at its beginning.
steering wheel is self-centering. The
electronic interface of the steering wheel acts like
a joystick interface. The tiller axis calibration was
done with FSUIPC (Joystick Calibration, Steering Tiller Axis). FSUIPC
uses the tiller axis to drive the FS rudder when on
the ground and speeds of less than 60 knots
(an adjustable figure in fsuipc.ini --> MaxSteerSpeed), and the rudder in the air
and on the ground above 60 KIAS. Below the
changeover speed control is divided proportionally
between tiller and rudder, so that, for example, at
30 knots it is half-and-half. But be careful, if the tiller
is set too sensitive you might over steer and leave
the rwy in a hurry. To avoid this use the
possibility of FSUIPC to make the slope less steep
at its beginning.
 Disassabled gearbox from Thrustmaster Challenge
Disassabled gearbox from Thrustmaster Challenge
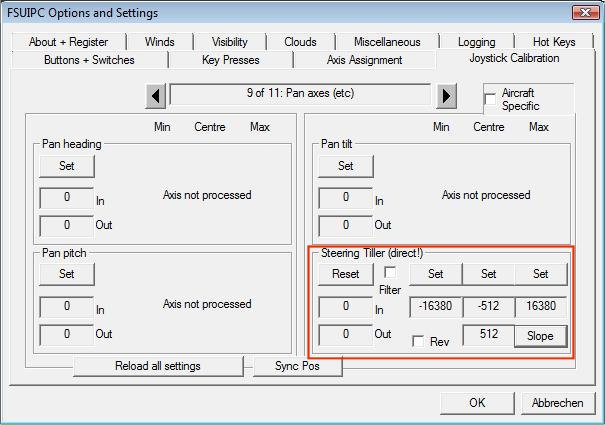
Tiller axis calibration in FSUIPC
Links:
SIMPARTS:
http://www.simparts.de/